
Gemini Robotics apresenta robô com IA rodando local
TecnologiaGoogle apresenta uma SDK que roda localmente em um robô humanoid. Uma evolução e tanta, que agora vai permitir uma responsividade muito maior e mais liberdade para usar em ambientes sem internet.

A inteligência artificial (IA) tem avançado a passos largos, e sua convergência com a robótica está redefinindo o que é possível no mundo físico. Recentemente, o Google DeepMind apresentou o Gemini Robotics On-Device, um modelo de IA que promete trazer capacidades avançadas de manipulação robótica diretamente para os dispositivos, sem a necessidade de conexão constante com a nuvem. Este desenvolvimento não é apenas um marco tecnológico, mas também um catalisador para uma nova era de autonomia e eficiência em sistemas robóticos.
Este artigo explora o Gemini Robotics On-Device, suas capacidades, vantagens e os desafios inerentes à IA embarcada. Além disso, farei uma análise crítica, comparando-o com outras tecnologias similares e discutindo o panorama futuro da IA na robótica, especialmente para programadores e engenheiros de software que buscam entender e aplicar essas inovações.
O que é o Gemini Robotics on-device?
O Gemini Robotics On-Device é uma versão otimizada do modelo de fundação Gemini Robotics, projetado especificamente para rodar localmente em dispositivos robóticos. Isso significa que ele opera independentemente de uma rede de dados, o que é crucial para aplicações sensíveis à latência e para garantir robustez em ambientes com conectividade intermitente ou inexistente.
A base desse modelo é a capacidade multimodal de raciocínio do Gemini 2.0, que permite ao robô entender e interagir com o mundo físico de forma mais intuitiva. O "On-Device" foca na eficiência, oferecendo destreza de propósito geral e uma adaptação rápida a novas tarefas. Ele foi desenvolvido para robôs bimanual, exigindo recursos computacionais mínimos.
Principais características e vantagens:
- Execução totalmente local: A capacidade de rodar o modelo diretamente na GPU onboard do robô elimina a dependência da internet para o controle de ciclo fechado. Isso reduz drasticamente a latência, tornando os robôs mais responsivos e confiáveis em operações críticas, como em hospitais, fábricas e ambientes domésticos.
- Destreza bimanual coordenada: O modelo é pré-treinado em grandes conjuntos de dados, como o ALOHA, e refinado para permitir que robôs realizem tarefas complexas de manipulação com as duas mãos. Isso inclui ações delicadas como descompactar sacolas, dobrar roupas e até mesmo montar componentes industriais, que exigem um controle motor fino e integração de feedback em tempo real.
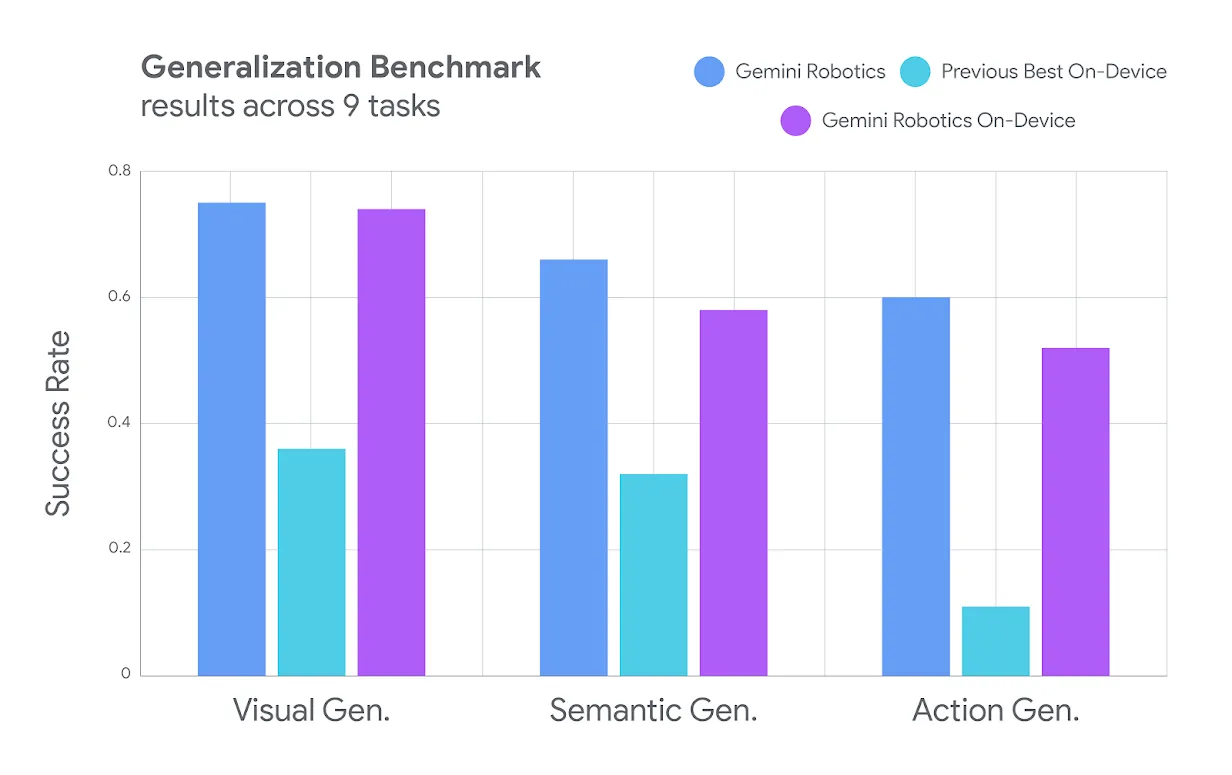
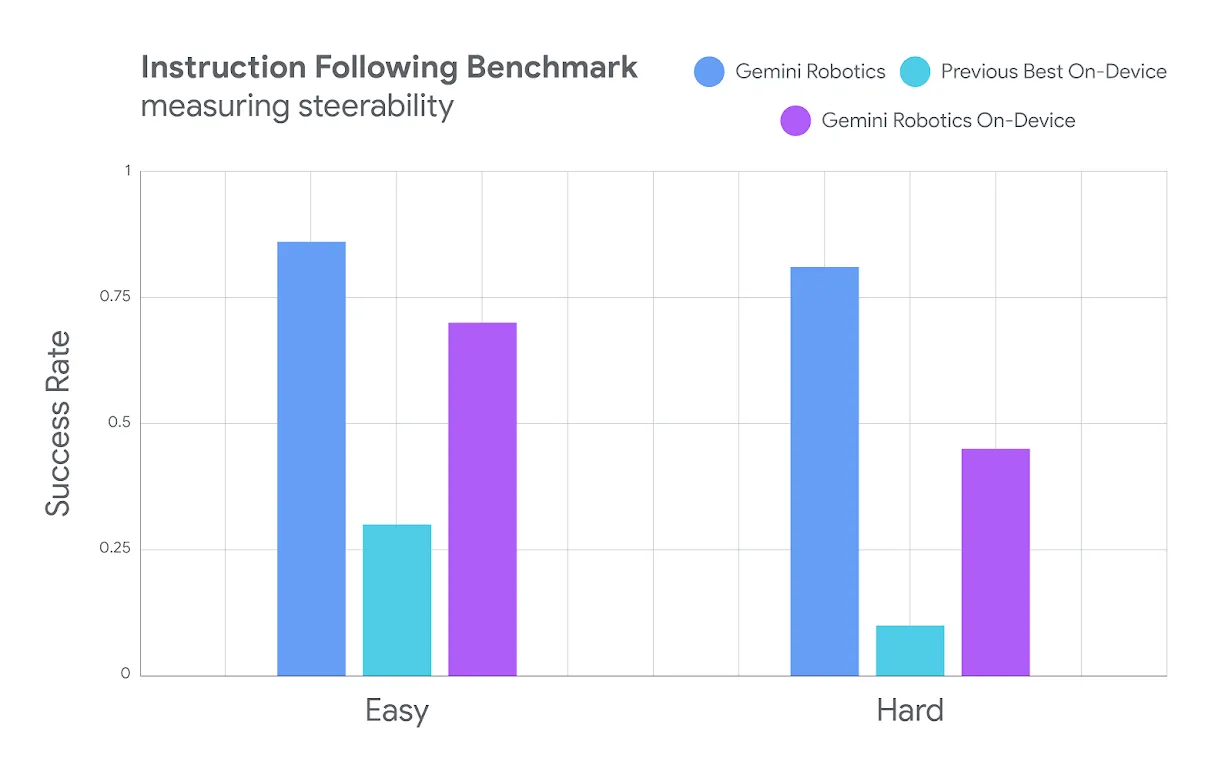
- Generalização robusta: O Gemini Robotics On-Device demonstra forte generalização visual, semântica e comportamental. Ele pode seguir instruções em linguagem natural e executar tarefas complexas mesmo em cenários nunca vistos antes (fora da distribuição) e com instruções de múltiplos passos. Isso é um diferencial importante, pois muitos modelos de IA têm dificuldades em lidar com situações inesperadas.
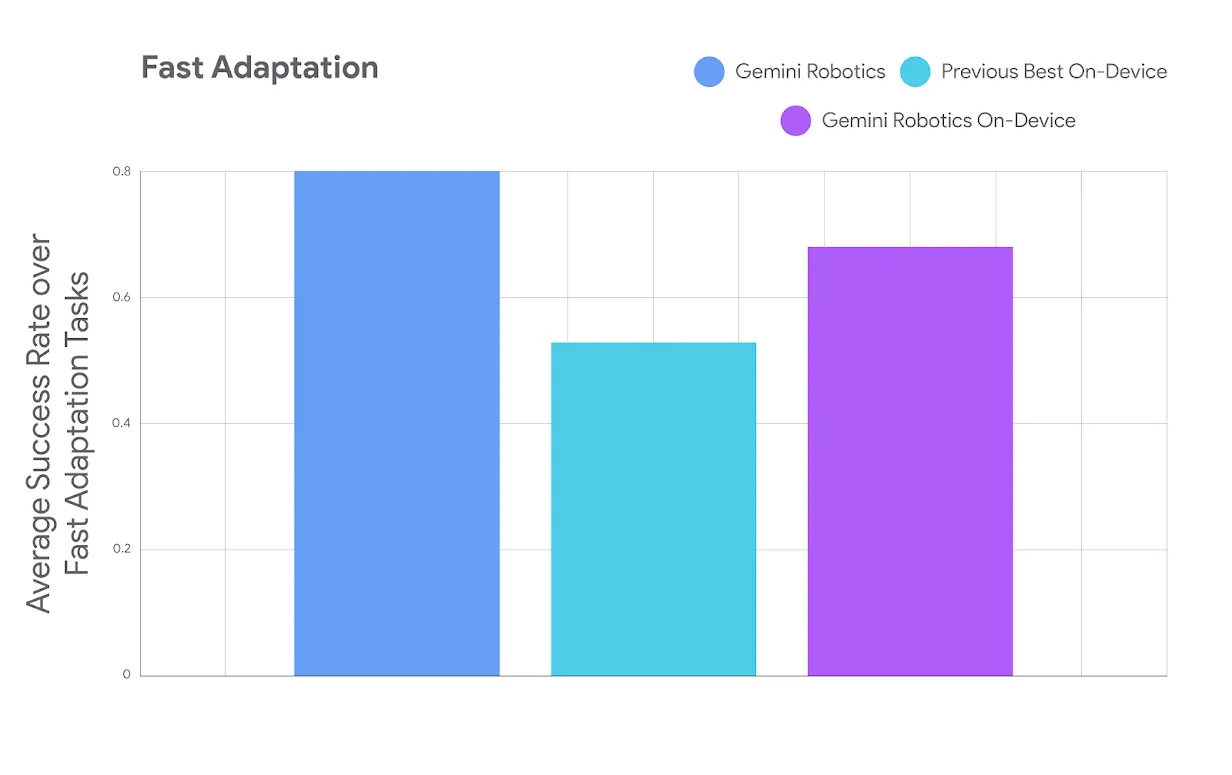
- Adaptação rápida com poucas demonstrações: Uma das inovações mais significativas é a capacidade de adaptar o modelo a novas tarefas com apenas 50 a 100 demonstrações. Isso acelera drasticamente o processo de customização para ambientes específicos ou novas formas robóticas. Para desenvolvedores, isso significa menos tempo e recursos investidos no treinamento, permitindo experimentação e prototipagem rápidas.
- SDK para desenvolvedores: O Google DeepMind está liberando um SDK (Software Development Kit) para facilitar a avaliação e adaptação do modelo. O SDK permite testar o modelo no simulador de física MuJoCo (que foi recentemente tornado de código aberto com novos benchmarks para destreza bimanual) e rapidamente adaptá-lo a novos domínios. Isso democratiza o acesso a tecnologias de ponta, permitindo que pesquisadores, startups e desenvolvedores integrem a IA avançada em seus projetos.
- Versatilidade de hardware: Embora o modelo base tenha sido treinado para robôs ALOHA, ele foi adaptado com sucesso para diferentes estruturas robóticas, incluindo robôs Franka FR3 bimanual e o robô humanoide Apollo da Apptronik. Essa capacidade de adaptação a diversas plataformas de hardware destaca a generalizabilidade do modelo.
Desafios da IA embarcada na robótica
Embora o Gemini Robotics On-Device represente um avanço significativo, a implementação da IA embarcada em robótica não está isenta de desafios.
- Restrições de recursos computacionais: Rodar modelos de IA complexos diretamente em hardware de robôs implica em lidar com recursos computacionais limitados (CPU, GPU, memória). A otimização desses modelos para que funcionem eficientemente em ambientes com restrições de energia e processamento é um desafio constante.
- Precisão vs. eficiência: Comprimir modelos de IA que originalmente rodam em servidores poderosos na nuvem para operar em chips de dispositivos pode resultar em um aumento nas taxas de erro ou na redução do desempenho. Equilibrar a necessidade de alta precisão com a eficiência computacional é crucial. As Unidades de Processamento Neural (NPUs) são uma solução promissora para executar IA em dispositivos com melhor desempenho e eficiência energética.
- Integração e calibração de sensores: Robôs dependem de dados de sensores para percepção e tomada de decisão. A integração de múltiplos sensores, o tratamento de ruído e a calibração para garantir a precisão dos dados são complexos. A fusão de dados de diferentes sensores exige algoritmos sofisticados.
- Generalização limitada e dados de treinamento: Embora o Gemini Robotics On-Device demonstre boa generalização, muitos algoritmos de IA ainda podem ter dificuldades em aplicar seu conhecimento a cenários novos ou inesperados. Coletar e rotular dados de treinamento de alta qualidade e diversificados continua sendo um gargalo caro e demorado.
- Robustez e resiliência: Os algoritmos de IA para robôs precisam ser robustos e resilientes a variações do sistema, distúrbios ambientais e falhas de hardware. Interrupções nas leituras dos sensores, rotas de comunicação ou componentes de hardware podem impactar o desempenho do robô, exigindo mecanismos de tolerância a falhas e recuperação.
- Segurança e ética: À medida que os robôs com IA se tornam mais autônomos e interagem com humanos, surgem questões críticas de segurança, confiabilidade e ética. Garantir a segurança dos robôs e das pessoas em ambientes compartilhados, além de lidar com preocupações éticas como viés, privacidade e responsabilidade, são desafios significativos. O Google DeepMind aborda isso com uma abordagem de segurança holística, incluindo segurança semântica e física, e a revisão de avaliações de impacto por equipes dedicadas.
Análise crítica: Comparando o Gemini Robotics On-Device com outras abordagens
Para entender verdadeiramente o impacto do Gemini Robotics On-Device, é importante compará-lo com as abordagens existentes e emergentes na robótica e IA.
Modelos baseados em nuvem vs. on-device:
Tradicionalmente, muitos sistemas robóticos com IA dependem fortemente da computação em nuvem para processamento intensivo de dados e inferência.
- Vantagens da nuvem: Modelos baseados em nuvem podem acessar poder computacional praticamente ilimitado, permitindo o uso de modelos maiores e mais complexos. Isso é ideal para tarefas que exigem análise profunda de dados ou onde a latência não é um fator crítico. A manutenção e atualização dos modelos são centralizadas, facilitando a distribuição de melhorias.
- Desvantagens da nuvem: A principal desvantagem é a latência inerente à comunicação de rede. Para tarefas robóticas que exigem respostas em tempo real, como controle motor preciso ou navegação em ambientes dinâmicos, mesmo pequenos atrasos podem ser problemáticos. A dependência da conectividade à internet também é uma limitação em ambientes com sinal fraco ou inexistente. Além disso, a transferência de dados sensíveis para servidores externos levanta preocupações com privacidade e segurança.
- Gemini Robotics On-Device como solução: O Gemini Robotics On-Device ataca diretamente essas desvantagens. Ao operar localmente, ele elimina a latência da rede e garante o funcionamento em qualquer ambiente. A privacidade é aprimorada, pois os dados sensíveis permanecem no dispositivo. Embora possa não ter o poder computacional bruto de um modelo de nuvem, sua otimização para "on-device" significa que ele pode manter um desempenho impressionante para manipulação destreza sem comprometer a eficiência. Carolina Parada, Head de Robótica no Google DeepMind, observa que, embora o modelo híbrido baseado em nuvem ainda seja mais poderoso, o desempenho do modelo "on-device" é surpreendentemente forte, tornando-o ideal para aplicações onde a conectividade é limitada.
Comparação com Outras Tecnologias de IA Embarcada:
O campo da IA embarcada em robótica está crescendo, e o Gemini Robotics On-Device não é o único jogador.
- Tesla optimus: O robô humanoide Optimus da Tesla é um exemplo notável de robótica avançada. Embora demonstre capacidades impressionantes em tarefas como dobrar camisetas e cozinhar, ele ainda depende de uma conexão com a internet para enviar dados para servidores em nuvem para processamento. Essa dependência de nuvem é a principal distinção em relação ao Gemini Robotics On-Device, que processa todos os dados localmente. A abordagem do Google DeepMind com o Gemini Robotics On-Device prioriza a autonomia total e a independência de conectividade para operação em tempo real.
- AI Edge Gallery e TensorFlow Lite: Iniciativas como o AI Edge Gallery e tecnologias como o TensorFlow Lite da Google também focam na IA em dispositivos de borda. Essas plataformas e frameworks permitem a implantação de modelos de aprendizado de máquina otimizados em dispositivos com recursos limitados. Eles são cruciais para o desenvolvimento de soluções de IA embarcada em uma variedade de hardware. O Gemini Robotics On-Device se beneficia dessa filosofia, sendo um modelo VLA (Vision Language Action) que se integra nesse ecossistema de otimização para borda. A diferença fundamental é que o Gemini Robotics On-Device é um modelo de fundação específico para robótica, enquanto TensorFlow Lite é um framework mais geral para implantar modelos em dispositivos.
- Abordagens tradicionais de robótica: Muitos robôs industriais e de serviço ainda utilizam abordagens de programação mais tradicionais, com algoritmos baseados em regras e programação explícita para tarefas específicas. Embora esses robôs sejam extremamente confiáveis e eficientes para tarefas repetitivas em ambientes controlados (com MTBF, tempo médio entre falhas, de centenas de milhares de horas), eles carecem da flexibilidade, adaptabilidade e capacidade de generalização que um modelo de IA como o Gemini Robotics On-Device oferece. A mudança para modelos baseados em IA permite que os robôs aprendam e se adaptem a novas situações sem a necessidade de reescrever código complexo para cada variação de tarefa.
Impacto e perspectivas futuras para programadores e engenheiros de software
O advento de modelos como o Gemini Robotics On-Device tem implicações profundas para a comunidade de programadores e engenheiros de software.
- Democratização da robótica avançada: O SDK do Gemini Robotics e a capacidade de ajustar o modelo com poucas demonstrações significam que o desenvolvimento de aplicações robóticas avançadas se torna mais acessível. Desenvolvedores que antes precisavam de vasta experiência em robótica de baixo nível ou grandes conjuntos de dados podem agora iterar mais rapidamente e focar na lógica de aplicação e na experiência do usuário. Isso abre as portas para pequenas equipes e startups inovarem em áreas que antes eram dominadas por grandes laboratórios de pesquisa ou empresas com recursos massivos.
- Foco em abstrações superiores: Com modelos de fundação de alto nível lidando com a complexidade da percepção e do controle motor, os engenheiros podem se concentrar em desafios de maior nível, como planejamento de missão, interação humano-robô (HRI) e integração de sistemas. Isso significa menos tempo gasto em otimizações de hardware ou ajustes finos de cinemática e mais tempo em criar valor real para o usuário final.
- Novas oportunidades de desenvolvimento: A demanda por engenheiros com experiência em otimização de modelos para dispositivos de borda, desenvolvimento de SDKs e ferramentas para robótica, e design de pipelines de dados eficientes para treinamento com poucas demonstrações, tende a crescer. Além disso, a integração da IA com a Internet das Coisas (IoT) abre caminho para ecossistemas robóticos mais conectados e automatizados.
- Desafios para o engenheiro: Apesar das facilidades, ainda existem desafios significativos. A depuração de modelos de IA em ambientes físicos pode ser complexa, e entender os modos de falha e as limitações dos modelos é crucial para construir sistemas robóticos seguros e confiáveis. A necessidade de expertise em IA e processadores para otimização "on-device" ainda é um gargalo, e a criação de equipes multidisciplinares com conhecimento em ambos os domínios é essencial.
- O futuro da automação e da interação humano-robô: A IA embarcada está pavimentando o caminho para robôs que podem operar em uma gama muito mais ampla de ambientes, incluindo hospitais, casas e áreas remotas, sem depender de infraestrutura de rede robusta. Isso levará a uma maior adoCão de robôs para tarefas de serviço, assistência pessoal e automação industrial. A capacidade de robôs entenderem e responderem a instruções em linguagem natural tornará a interação mais intuitiva e natural, facilitando a colaboração entre humanos e máquinas.
- IA físicas e generalizáveis: O foco em "IA física" — inteligência artificial que compreende as leis da física e pode operar no mundo real — está impulsionando a próxima onda de inovação. Robôs humanoides e outros formatos estarão cada vez mais aptos a realizar tarefas complexas e genéricas, tornando a visão de droids domésticos uma realidade mais próxima.
Conclusão
O Gemini Robotics On-Device do Google DeepMind é um passo significativo em direção a robôs mais autônomos, eficientes e versáteis. Ao trazer capacidades avançadas de IA diretamente para o dispositivo, ele supera as barreiras da latência e da conectividade, abrindo novas fronteiras para aplicações robóticas em diversos setores.
Para programadores e engenheiros de software, este desenvolvimento significa uma mudança de paradigma. A era da robótica não está mais restrita a especialistas em hardware complexo, mas está se tornando um campo fértil para inovadores de software que podem aproveitar modelos de fundação e SDKs intuitivos para criar soluções transformadoras. No entanto, é fundamental que a comunidade de desenvolvimento continue a abordar os desafios técnicos e éticos inerentes à IA embarcada, garantindo que essas tecnologias sejam desenvolvidas e implantadas de forma responsável.
O futuro da IA na robótica é promissor, com a expectativa de robôs cada vez mais capazes de aprender, adaptar-se e interagir de forma inteligente com o ambiente e com os seres humanos. O Gemini Robotics On-Device é um exemplo claro de como a inovação contínua está nos aproximando de um futuro onde a colaboração humano-robô é não apenas possível, mas também integral à nossa vida diária e ao avanço de diversas indústrias.
Comments